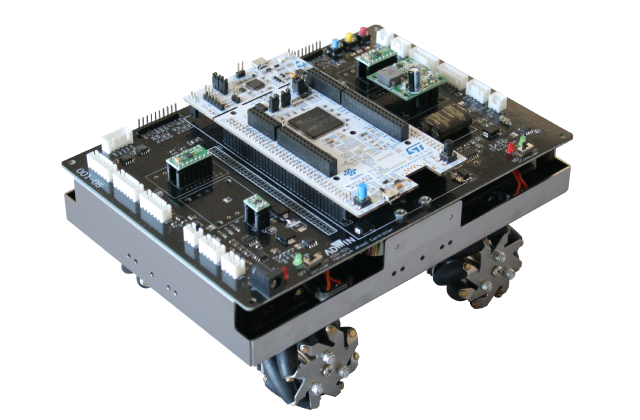
A5用紙サイズの4輪駆動全方位移動ロボット
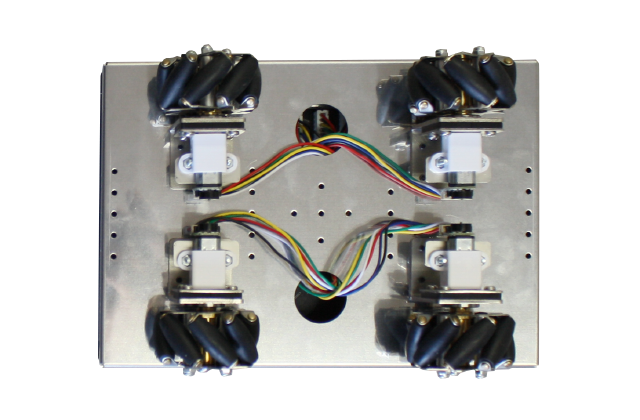
メカナムホイールは、45°傾いた樽型ローラーで構成された特殊な車輪です。4つの車輪を個々に制御することで定置旋回や車体の向きを変えずに全方向移動が可能です。
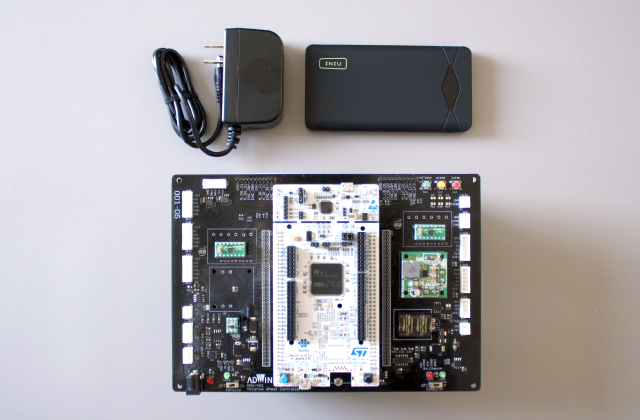
センサやカメラを搭載すれば、ものを避けたり追いかけたり、まさに「ロボット」さながらの動きをします。制御用マイコンとして
STM32Nucleoを標準で搭載しており、開発環境は無償の「STM32CubeIDE」や「Mbed」を利用できます。STM32用のサンプルソースをご用意しておりますので、すぐに動かしてみることができます。
さらに、オプションのボードを介してRaspberryPiやJetsonNanoを搭載可能で、ROS(Robot Operating
System)の実装やカメラ画像解析による自動運転など、より高度な制御実験が可能になります。
本製品は、研究開発用のベースロボットとして最適です。
- オープンソースソフトウェアでつくる制御実習ロボット
- インテリジェントなロボット・アプリケーションの開発
- ROSを搭載した移動台車開発のための基礎技術の修得
本体仕様
| 商品名 |
メカナムホイールロボットA5(エーゴ) |
| 型番 |
AKM-2102 |
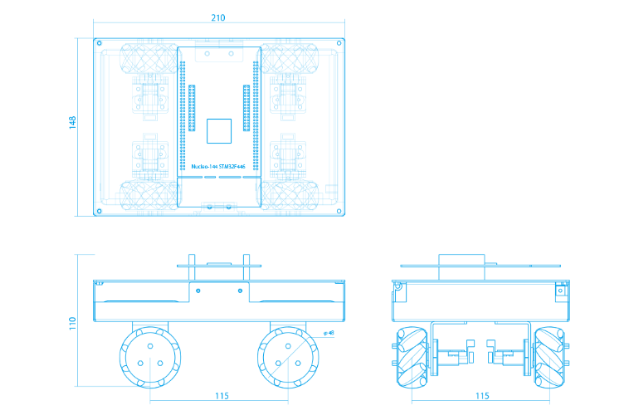
| サイズ |
W148 × D210 × H120(mm) |
| 重量 |
約 1.2 kg(バッテリーを除く) |
| 積載可能重量 |
約 2 kg |
| タイヤ径 |
φ 48
|
| モータ |
エンコーダ付 DC モータ FIT0485 |
| 標準マイコン |
Nucleo-144 STM32L4A6ZG |
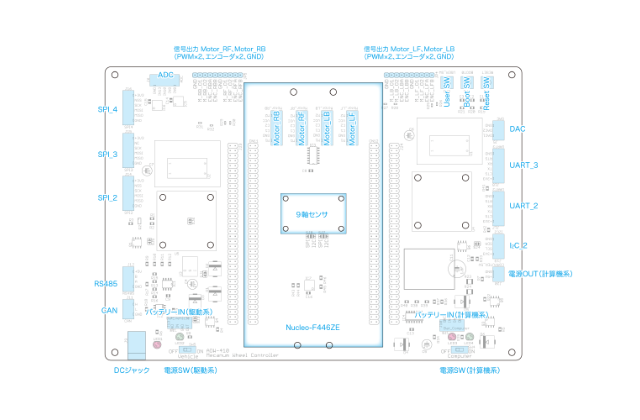
| インターフェース |
SPI×3、UART×2、I2C、CAN、RS485、USB、A/D、D/A、GPIO |
| 電源 |
DC 5V |
※ 標準マイコンは入手性により同等の別機種になる場合があります。ご了承ください。
駆動輪モータ仕様
| 減速前回転数 |
15000 rpm |
| 減速比 |
210:1 |
| 無負荷回転数 |
75 rpm @6V |
| 無負荷電流 |
60 mA |
| 定格トルク |
1.4 kg.cm |
| 定格回転数 |
42 rpm @6V |
| 定格電流 |
170 mA |
| 瞬間最大トルク |
< 2.8 kg.cm |
| エンコーダ解像度 |
2940 ppr(Pulses per Revolution) |
バッテリー仕様
| タイプ |
リチウムポリマー |
| 出力電圧 |
DC 5V |
| 最大電流 |
3 A |
| 容量 |
10000 mAh |
| サイズ |
130 × 70 × 15 mm |
| 重量 |
約200 g |
| PSE |
認証済 |
ラインアップ
| 型番 |
商品構成 |
価格(税込) |
| AKM-2102 |
基本セット |
99,000 |
| AKM-2102-OP00 |
拡張セット |
77,000 |
※ 拡張セットは受注生産となるため別途お問い合わせください。
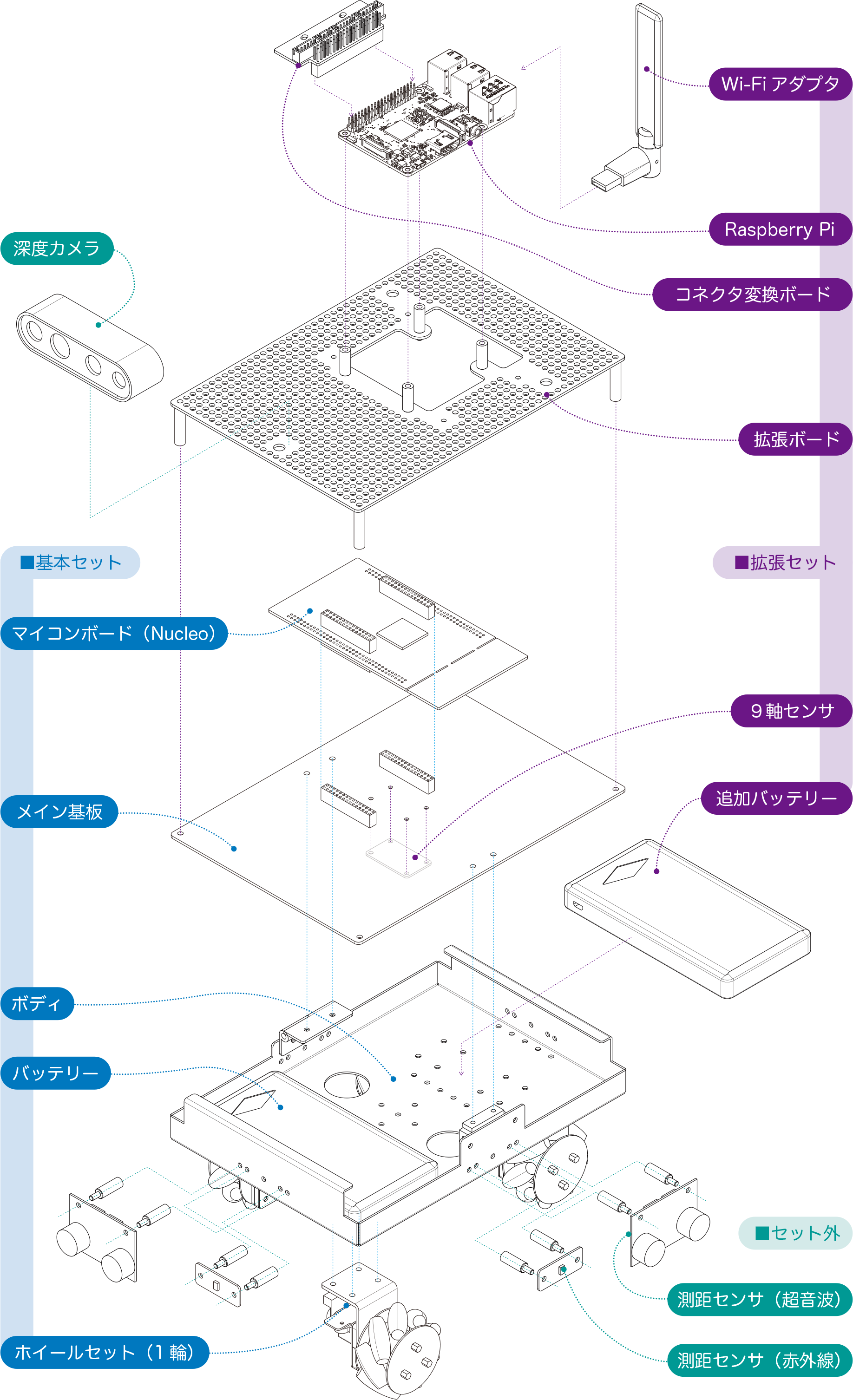
補修部品は「セット構成図」に示したパーツ単位でご購入いただけます。
セット構成図
カリキュラム例
ご注意ください
下記は、本製品が採用された enPiT 実践的ラボ演習科目 のカリキュラム例です。
弊社がご提供できるのは、本ページに掲載されている資料がすべてです。下記例の実習資料はございませんので、予めご了承下さいますようお願い申し上げます。
| STEP |
日程 |
内容 |
|
1日目 |
演習準備作業 |
| 1 |
1日目 1コマ |
イントロダクション、Ubuntuインストール |
| 2 |
1日目 2コマ |
ROSインストール及び動作確認 |
| 3 |
1日目 3コマ |
STM32開発環境整備 |
| 4 |
1日目 4コマ |
STM32プログラミング |
|
2日目 |
インテリジェントなROSノードの作成準備 |
| 5 |
2日目 1コマ |
RTOSを用いたSTM32プログラミング |
| 6 |
2日目 2コマ |
9軸センサ・プログラミング |
| 7 |
2日目 3コマ |
ros_serialプログラミング |
| 8 |
2日目 4コマ |
9 軸センサ・ノードの作成 |
|
3日目 |
JetsonNanoを用いた遠隔操縦の準備 |
| 9 |
3日目 1コマ |
JetsonNanoへROSのインストール |
| 10 |
3日目 2コマ |
ros_serialのインストール |
| 11 |
3日目 3コマ |
メカナムロボットの運動学 |
| 12 |
3日目 4コマ |
STM32入出力遠隔制御実習 |
|
4日目 |
奥行カメラとSLAMのインストール |
| 13 |
4日目 1コマ |
RealSenseSDKのインストール |
| 14 |
4日目 2コマ |
orb-slam2のインストール |
| 15 |
4日目 3コマ |
orb-slam2の動作確認 |
| 16 |
4日目 4コマ |
orb-slam2とROSの連携確認 |
|
5日目 |
移動ロボットの遠隔操縦 |
| 17 |
5日目 1コマ |
Joystickのインストール |
| 18 |
5日目 2コマ |
メカナムロボット制御実習1 |
| 19 |
5日目 3コマ |
メカナムロボット制御実習2 |
| 20 |
5日目 4コマ |
ROSによる分散制御実習 |
|
6日目 |
ROSを用いた情報収集とデータ分析 |
| 21 |
6日目 1コマ |
orb-slam2を用いた地図作成1 |
| 22 |
6日目 2コマ |
orb-slam2を用いた地図作成2 |
| 23 |
6日目 3コマ |
コストマップを用いた例
(ROSを用いた移動ロボットのナビゲーション) |
| 24 |
6日目 4コマ |
まとめ |